Roboter sollen uns langweilige oder unangenehme Arbeiten abnehmen – das wünschen sich wohl alle. Doch gerade lästige Tätigkeiten wie etwas das Badezimmerputzen sind technisch gesehen recht schwer zu automatisieren. Wie plant man die Bewegung eines Roboterarms, damit er jede Stelle eines Waschbeckens erreicht? Was ist, wenn das Becken speziell gekrümmte Kanten hat? Wie viel Kraft soll an welcher Stelle angewendet werden?
All diese Dinge präzise in feste Regeln und vorgegebene mathematische Formeln zu fassen wäre extrem aufwändig. An der TU Wien ging man daher nun einen anderen Weg: Einem Roboter wird mehrmals von einem Menschen gezeigt, was er tun soll: Mit einem speziell präparierten Schwamm wird eine Waschbeckenkante geputzt. Der Roboter lernt dadurch, wie das Putzen funktioniert, und kann dieses Wissen nun auch flexibel auf anders geformte Objekte anwenden. Die Arbeit wurde nun bei der IROS 2024 in Abu Dhabi publiziert– einer der renommiertesten Robotik-Konferenzen der Welt.
Putzen, Schleifen, Nachpolieren
Putzen ist nur eine Art von Oberflächenbearbeitung. Viele andere Tätigkeiten, die in der Industrie auch eine große Rolle spielen, sind technisch gesehen ganz ähnlich – etwa das Abschleifen oder Polieren von Oberflächen, das Anmalen oder das Applizieren von Klebstoff.
„Die geometrische Form eines Waschbeckens mit Kameras zu erfassen, ist relativ einfach“, sagt Prof. Andreas Kugi vom Institut für Automatisierungs- und Regelungstechnik der TU Wien. „Aber das ist noch nicht der entscheidende Schritt. Viel schwieriger ist es, dem Roboter beizubringen: Welche Stelle der Oberfläche soll er mit welcher Art von Bewegung bearbeiten? Wie schnell? In welchem Winkel? Mit welchem Kraftaufwand?“
Menschen lernen so etwas durch Erfahrung und Imitation. „In einer Werkstatt blickt dann vielleicht jemand dem Lehrling über die Schulter und sagt: Dort bei der engen Kante musst du ein bisschen fester andrücken“, sagt Christian Hartl-Nesic, der im Team von Andreas Kugi die Industrial Robotics-Gruppe leitet. „Wir wollten einen Weg finden, den Roboter auf ganz ähnliche Art lernen zu lassen.“
Putzschwamm mit Vorführeffekt
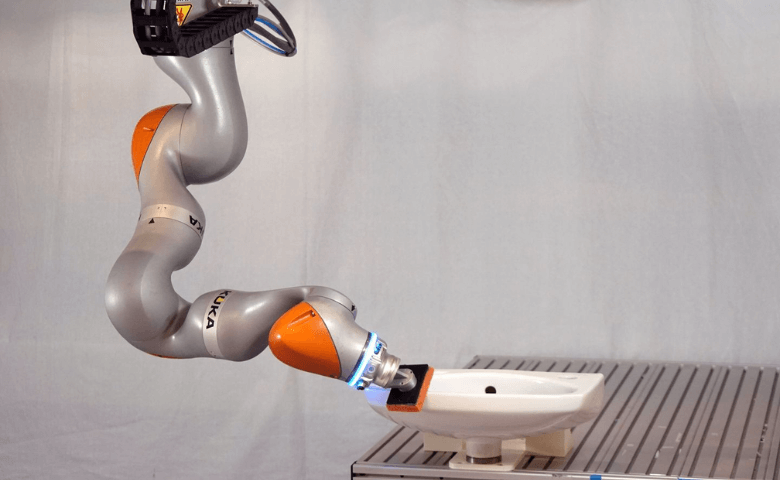
Dafür wurde ein eigenes Putzwerkzeug entwickelt: Ein Putzschwamm wurde mit Kraftsensoren und Tracking-Markern versehen, dann wurde damit von Menschen wiederholt ein Waschbecken geputzt – allerdings nur die Vorderkante. „Aus einigen wenigen Demonstrationen generieren wir eine Riesenmenge an Daten, die dann verarbeitet werden, damit der Roboter lernt, was richtiges Putzen eigentlich bedeutet“, erklärt Christian Hartl-Nesic.
Dieser Lernprozess gelingt durch eine innovative Datenverarbeitungsstrategie, die vom Team der TU Wien entwickelt wurde. Dabei werden mehrere bereits bestehende Techniken aus dem Bereich Maschinenlernen kombiniert: Die Messdaten werden zunächst statistisch aufbereitet, mit den Ergebnissen wird ein neuronales Netzwerk trainiert, womit vordefinierte Bewegungselemente (sogenannte „motion primitives“) gelernt werden. Damit wird der Roboterarm optimal angesteuert, um die Oberfläche zu reinigen.
Durch diesen neuartigen Lernalgorithmus erreicht man, dass der Roboter nach dem Vorzeige-Training auch selbst putzen kann – und zwar das ganze Waschbecken oder auch andere Objekte mit kompliziert geformter Oberfläche, obwohl ihn nur das Putzen einer einzige Waschbecken-Kante vorgezeigt worden ist. „Der Roboter lernt, dass man den Schwamm je nach Oberflächenform anders halten muss, dass man an einer eng gekrümmten Stelle eine andere Kraft aufwenden muss als auf einem ebenen Flächenstück“, erklärt der Doktorand Christoph Unger aus der Industrial Robotics-Gruppe.
Zukunftsvision: Wenn alle Werkstattroboter gemeinsam lernen
Die vorgestellte Technologie ist für viele Prozesse interessant, sei es das Schleifen von Holzwerkstücken in Tischlereien, das Reparieren und Polieren von Lackschäden in Fahrzeugkarosserien oder das Schweißen von Blechteilen in Schlossereien. Gerade hier sind kleine Stückzahlen von großer Bedeutung. In der Zukunft könnte dieser Roboter auf eine mobile Plattform gesetzt werden, wodurch dieser überall in Handwerksbetrieben als hilfsbereiter Werkstattroboter eingesetzt werden kann. In einer kurzen Trainingsphase wird die gewünschte Aufgabe vorgezeigt und im Anschluss kann der Roboter selbstständig die Tätigkeit auf gleichen und ähnlichen Werkstücken ausführen.
Solche Roboter könnten dann sogar ihr Wissen miteinander teilen. „Stellen wir uns vor, es gibt viele Werkstätten, die mit solchen Robotern Oberflächen abschleifen oder lackieren. Dann könnte man die Roboter jeweils einzeln an lokalen Daten Erfahrung sammeln lassen, die daraus gelernten Parameter könnten aber alle Roboter miteinander teilen“, sagt Andreas Kugi. Private Daten – etwa über die konkrete Form eines bestimmten Werkstücks – würden privat bleiben, aber wichtige erlernte Grundprinzipien würden ausgetauscht, um die Fähigkeiten aller Roboter weiter zu verbessern. Man spricht in diesem Fall von „federated learning“.
In zahlreichen Versuchen konnte an der TU Wien die Flexibilität des Waschbecken-Putzroboters bereits bewiesen werden. Auch international sorgt die Technologie bereits für Aufsehen: Bei der IROS 2024 (14. Bis 18. Oktober 2024), einer Konferenz mit über 3500 eingereichten wissenschaftlichen Arbeiten, wurde die Arbeit der TU Wien mit dem „Best Application Paper Award“ ausgezeichnet und somit unter die Top-Innovationen des Jahres gewählt.
Originalpublikation
ProSIP: Probabilistic Surface Interaction Primitives for Learning of Robotic Cleaning of Edges; C. Unger, C. Hartl-Nesic, MN. Vu, and A. Kugi, IROS 2024. https://www.acin.tuwien.ac.at/file/publications/cds/pre_post_print/unger2024.pdf


