Die Bedürfnisse von KundInnen sowie das Konsumverhalten haben sich durch E-Commerce und Onlineshopping stark verändert. Kunden wollen On-Demand-Verfügbarkeit für alle Lebensbereiche. Die steigende Nachfrage nach Paketen in den Städten führt jedoch zu einer wesentlich höheren Anzahl von Lieferwagen in den Stadtzentren. Dies belastet die bestehende Infrastruktur zusätzlich, führt zu Staus und hat negative Auswirkungen auf Gesundheit, Umwelt und Sicherheit. Das wachsende Problembewusstsein bei KundInnen und neue Gesetzgebungen zwingen Kurierdienste dazu, ihre Bemühungen um einen nachhaltigen und umweltfreundlichen Betrieb zu verstärken.
Am ITS-Lehrstuhl für Nachhaltige Transportlogistik 4.0 der Johannes Kepler Universität Linz untersucht man deshalb die Umsetzbarkeit und Benutzerfreundlichkeit von mobilen Paketstationen oder Schließfächern wie jenen der Post AG. Die FH Technikum Wien ist Kooperationspartner des Lehrstuhls und unterstützte das Linzer Team nun auch bei der Entwicklung eines mobilen Zustellroboters.
Gefördert wird der Lehrstuhl neben der FHTW durch das Bundesministerium für Klimaschutz, Umwelt, Energie, Mobilität, Innovation und Technologie (BMK), die Österreichische Forschungsförderungsgesellschaft (FFG), die Österreichische Post und den Engineering-Dienstleister der Automobilindustrie IAV GmbH.
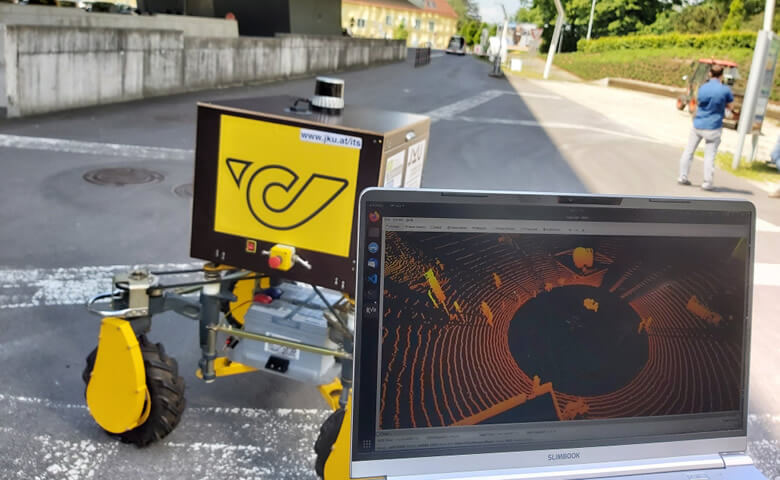
„Wir forschen an der Implementierung von Systemen, die auf dem Datenaustausch zwischen Fahrzeugen, Infrastruktur und Personen basieren“, erläutert Lehrstuhlinhaberin Cristina Olaverri Monreal. Dabei kommen digitale Technologien zur Anwendung, die auf dem Einsatz von Sensorik der Informations- und Kommunikationstechnologien aufbauen. Dafür hat das Team am Lehrstuhl nun einen „Last Mile Delivery Robot”-Prototypen gebaut. Dazu wurde auf Basis eines von der FH Technikum Wien zur Verfügung gestellten Böschungsrasenmähers ein sensorbasiertes Wahrnehmungssystem entwickelt, um den Roboter mit Autonomie und Entscheidungsfindungssystemen auszustatten. „Das Zusammenspiel vielfältiger Technologien, von Photonik über Embedded Systems bis hin zur Robotik spiegelt auch sehr gut das Profil unserer Bachelor- und Master-Studiengänge an der FHTW wider“, sagt Gerd Christian Krizek von der FHTW, der die Kooperation koordiniert.
Um einen kosteneffizienten Prototypen zu realisieren, wurde der quasi-holonome – also in alle Richtungen direkt steuerbare – Rasenmäher so umgebaut, dass sein Lenkmechanismus dem eines PKW (Ackermann-Steuerung) ähnelt. Das Wahrnehmungs- und Lokalisierungssystem ist mit einer Infrarot-Stereokamera, einer RGB-Kamera, einem 64-Ebenen-360°-Lidar zur Abstand- und Geschwindigkeitsmessung sowie einem D-GPS System ausgestattet.
Die Kameradaten werden in Kombination mit einem sogenannten „Convolutional Neural Network“ verwendet, um Personen und Objekte wie Fahrräder, Scooter, Hunde, sowie andere VerkehrsteilnehmerInnen zu erkennen. Die Position der erkannten Objekte und Personen im Videostream wird anschließend in das Koordinatensystem des Lidar übertragen, um zu gewährleisten, dass diese Hindernisse bei der dynamischen Pfadplanung erkannt werden.
In Zukunft soll der Roboter, vollständig autonom, auf dem Campus der JKU Pakete und Briefe zustellen. Die Daten, die dabei aufgenommen werden, sollen ein besseres Verständnis über die Akzeptanz mobiler Zustellroboter liefern und Aufschluss darüber geben, wie mobile Roboter effizient in einer On-Demand-Welt eingesetzt werden können, um ein einfacheres, sicheres, und grüneres Leben in Städten zu ermöglichen.


